
Header image: Artist’s impression of a SpaceX Dragon spacecraft docking with the International Space Station (image source: NASA/SpaceX.)
In previous installments, we discussed the rocket equation, rocket propulsion, and how they govern the ability of a rocket to perform a mission. But as we learned through the science of orbital mechanics, the direction in which the rocket is pointed is crucial as well. A few degrees of orientation error during a maneuver, or a few centimetres of positional error during docking, can mean the difference between mission success and failure. Spacecraft maneuvering is radically different from controlling a vehicle in any other environment, and we will explore how it is done in this edition of Rocket Physics: The Hard Way.
“We have a violent left roll here at the present time and we can’t turn the RCS off…”
NASA ASTRONAUT NEIL ARMSTRONG, REPORTING TO MISSION CONTROL ABOUT THE MALFUNCTION OF GEMINI 8‘S SPACECRAFT MANEUVERING SYSTEM
Degrees of freedom
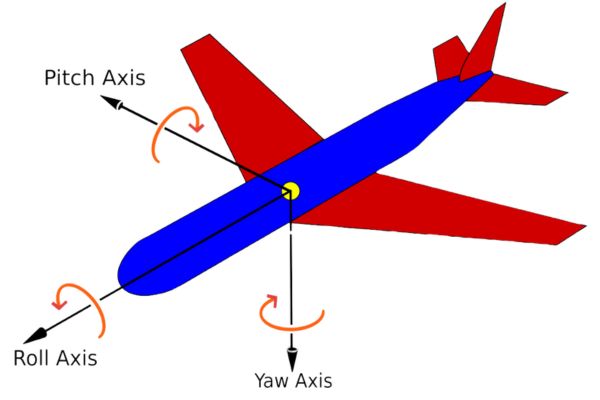
A spacecraft can move in six ways:
- Roll (or bank): rotating along its axis, clockwise and counterclockwise
- Yaw: rotating left and right
- Pitch: rotating up and down
- Forwards and backwards
- Up and down
- Left and right
Each of these ways of movement are known in controls engineering as degrees of freedom. Any rigid body in three-dimensional space has six degrees of freedom: three of rotation (or attitude) and three of translation (movement of the whole object through space.)
Generally, a spacecraft must control all three of its rotational degrees of freedom (pitch, roll, yaw) to successfully complete its mission. Spacecraft relying on solar power need to keep their solar panels pointed at the Sun. Telescopes must be kept pointed at their targets. During a maneuver, the engine must be pointed in precisely the right direction.
Spacecraft usually use a suite of multiple different sensors to sense their attitude. A common method is to use a gyroscope, which tends to remain aligned in a single direction by virtue of its angular momentum. The gyroscope can then be used as a reference for the spacecraft’s attitude. To provide more diverse sources of information and calibrate for the gyroscope’s spin drifting over time, the spacecraft may also use:
- Ion flow sensors, which detect the incoming stream of ions in the spacecraft’s direction of travel
- Horizon sensors, which look for the horizon
- Star trackers, which compare an image of the stars from an onboard telescope with an internal starmap
- Sun and Earth sensors, which calculate attitude based on their observed positions
- Magnetometers, which compare the measured local magnetic field with an internal map
Once the current attitude has been determined, the spacecraft then needs to take action to reach the attitude required for the mission. Let’s explore attitude control by starting with the next closest thing to a spacecraft, an aircraft.
Follow Us on Social Media!
Aerodynamic control
Aircraft control their attitude using control surfaces. These are panels placed in strategic locations on the aircraft’s wings that can be realigned to deflect the oncoming airflow, producing unbalanced forces. These unbalanced forces rotate the vehicle.

On an aircraft, its ailerons control roll, its rudder controls yaw, and its elevators control pitch. Similarly, when a spaceplane like the Space Shuttle flies through the atmosphere during its return to Earth, it uses control surfaces for attitude control. Given that these panels rely on aerodynamics, however, they won’t work outside the atmosphere. These control surfaces can also be heavy. For space-bound rockets where every gram counts, a more common solution is to move the engines instead.
Thrust Vector Control (TVC)
During videos of Starship landings, you may notice that the engine bells wobble around wildly:
The engines have not come loose – rather, they are being purposefully rotated to produce thrust at an angle. That produces a torque, causing the vehicle to rotate. This technique is known as thrust vector control, or TVC for short.
While TVC can be a powerful, high-torque way to adjust a spacecraft’s attitude, it only works while the main engines are firing. It also requires the engine to be mounted onto a gimbal with powerful actuators to rotate it.

For these reasons, TVC is mainly used for launch vehicles during ascent and is not usually used directly for translational control. In fact, launch vehicles usually do not rely on aerodynamic stabilization (i.e. fins), but only on TVC to stay on-course. Advantageously, this means control is maintained all the way through the rarefied regions of the atmosphere and in space.
For more precise maneuvering, especially once the main engines are off and the vehicle in space, we turn to other methods like reaction control systems.
Reaction Control Systems (RCS)
In space, one of the most effective ways to reorient a spacecraft is by firing small thrusters that are strategically positioned on its hull. These form the reaction control system, or RCS. A unique advantage of RCS is that it can provide not only attitude control, but also translational control, permitting the spacecraft to precisely control its movement in all six degrees of freedom. For example, the RCS may be used to make fine course correction burns that the main engine cannot perform because it is too powerful.
The Apollo spacecraft is an excellent example of an RCS configuration that provides control in all six degrees of freedom by strategically firing the thrusters for precision maneuvering:

For a detailed overview of the Apollo reaction control subsystem, see the manual here.
In the pilot episode of The Expanse, we see the hero’s spaceship Canterbury flip 180 degrees (or in the franchise’s parlance, a ‘flip-and-burn’) to realign its main engines for braking, in response to a distress call1. This is an example of RCS being used for attitude control. Look closely at the small jets of gas that rotate the ship – those are its RCS thrusters:
As mentioned earlier, RCS is also particularly well-suited for delicate maneuvers like docking. Here, RCS plays a key role in both rotational and translational control. This is a video of the (real) Russian Soyuz spacecraft TMA-19M firing its RCS thrusters as it approaches a docking port on the International Space Station; notice the puffs of RCS exhaust gas:
At timestamp 4:35, note that spacecraft commander Yuri Malechenko elects to abort the docking attempt and backs the Soyuz away from the ISS. This could only have been performed with the RCS thrusters operating in translation mode.
The design and fuel choices for RCS thrusters are drastically different from that of a rocket’s main engines, because their design requirements are different. While a main engine may need to fire only a few times during a mission and deliver a large amount of momentum, RCS thrusters may need to fire hundreds of times and deliver small, precisely-measured amounts of momentum. For these reasons, they tend to use monopropellant fuels like hydrazine or compressed nitrogen gas, which can have simple and reliable engine designs.

Angular momentum techniques
Angular momentum may seem like an abstract concept at first glance, but you encounter it in almost every waking moment. Linear momentum is the tendency of an object to keep moving in a straight line once it has been set in motion. In simple terms, it’s the reason that a billiard ball will keep moving even if no force is being applied to it. Momentum is always conserved, which means that it cannot be created or destroyed – it has to go somewhere. If the billiard ball collides with another ball, its momentum will be transferred to it. An object’s momentum is the product of its mass (or inertia) and its velocity. Linear momentum may be exchanged with other objects by exerting a force on them.
On the other hand, angular momentum is the tendency of an object to keep spinning if it was already spinning before. This is why a spinning top will keep spinning until it transfers its momentum to the Earth and the atmosphere by friction. An object’s angular momentum is the product of its moment of inertia (or how difficult it is to spin) and its angular velocity (or how rapidly it’s spinning.) Angular momentum may also be exchanged with other objects, but by exerting a torque (or turning effort) on them, rather than a regular pushing/pulling force.
Angular momentum is also conserved. This means that in the absence of any external forces, an object’s angular momentum must always remain constant. Consider the example of a spinning figure skater – if they draw their arms inwards, their angular velocity increases (they spin faster) because their moment of inertia has decreased. A figure skater with their arms drawn inwards is easier to spin than one with their arms spread out; hence, they have a smaller moment of inertia.
Some spacecraft use this principle to ‘de-spin’. The Phoenix Mars lander, which landed on Mars in May 2008, used a technique called a ‘yo-yo de-spin’ to slow its rotation after completing a burn. As shown in this animation, it does so by deploying two weights on tethers (no sound available):
As the tethers unspool the weights, the spacecraft’s moment of inertia increases, forcing its spin to slow down to conserve angular momentum. Then, the weights are jettisoned, taking their momentum with them.
(If you would like to try this at home, sit in an office chair and hold two heavy objects close to your chest. Then, set yourself spinning. Extend your arms so that the objects are now far away from your body, increasing your moment of inertia. Your spin should slow down. Now, drop the objects onto the ground – they will have taken away some of your angular momentum with them. Disclaimer: The Mars Society of Canada is not liable for any personal injury or damage to personal property this experiment may cause!)
The conservation of angular momentum can also be used to provide highly precise control of a spacecraft’s attitude through devices known as reaction wheels and control moment gyroscopes (or CMGs.) Both techniques involve equipping the spacecraft with rapidly-spinning flywheels oriented in various directions.
A control moment gyroscope works by reorienting one or more rapidly-spinning flywheels, forcing the rest of the spacecraft to begin rotating in order to conserve angular momentum. This is the reason that tilting a spinning bicycle wheel while sitting on an office chair causes the chair to rotate:
The ISS uses a set of control moment gyroscopes for attitude adjustments.
On the other hand, a reaction wheel works by varying the speed of the wheel’s rotation. Changing their speed requires the use of a motor or a brake to apply a force. In doing so, by Newton’s third law, an opposing force (a reaction) is exerted on the rest of the spacecraft, causing it to spin. Here is a small-scale demonstration of how reaction wheels can be used to stabilize an inverted pendulum:
Reaction wheels and CMGs are useful for rotating spacecraft slowly and with great precision, making them popular for satellites and space telescopes. For applications requiring large amounts of change in angular momentum (e.g. for heavy spacecraft or forceful maneuvers), the required reaction wheels and CMGs become too heavy, making RCS more suitable. Reaction wheels and CMGs also cannot provide translational control, meaning that an RCS system may be necessary. Additionally, over long periods of time, small external forces from the space environment eventually cause the spacecraft to gain more angular momentum than can be cancelled out by the onboard flywheels. This is a phenomenon known as ‘saturation’. The excess angular momentum has to be discarded using other methods, like RCS thrusters.
Magnetorquers

RCS thrusters change a spacecraft’s angular momentum by pushing against exhaust gases. Reaction wheels and CMGs change a spacecraft’s angular momentum by pushing against its internal flywheels. Magnetorquers change a spacecraft’s angular momentum by pushing against the planet itself. Or more precisely, against its magnetic field.
The planets Earth, Jupiter, Saturn, Uranus, and Neptune all have strong natural magnetic fields. If a magnet is placed inside such a magnetic field, it will try to orient itself to be parallel to the field lines. The more perpendicular and the stronger the two magnetic fields are, the stronger the torque (turning force) will be. To exploit this for attitude control, a spacecraft can be equipped with an electromagnet. As long as the electromagnet is not perfectly parallel with the local magnetic field, it will try to rotate the spacecraft into alignment. Such a device is known as a magnetorquer rod.
By equipping the spacecraft with three mutually perpendicular magnetorquers and knowledge of the direction of the local magnetic field, it can fully control its attitude without expending any fuel and without any moving parts – as long as none of the rods become parallel with the local magnetic field. If that occurs, that rod will cease to become effective. For the mathematical details, see the footnotes2.
Magnetorquers are not without their disadvantages either: the electromagnets may consume large amounts of power to generate a relatively weak torque, they depend on the strength and direction of the Earth’s magnetic field (which can be difficult to predict), and as mentioned previously, they may lose control in certain directions if oriented badly. They also cannot provide translational control3.
Magnetorquers are often combined with reaction wheels to obtain the best of both worlds. The Hubble Space Telescope relies on reaction wheels to control where it points in the sky. However, when these reaction wheels become saturated, it uses its magnetorquers to discard the excess angular momentum into the Earth. As a result, it can obtain high pointing precision from its reaction wheels, practically indefinitely, without needing any propellant.
Radiation pressure
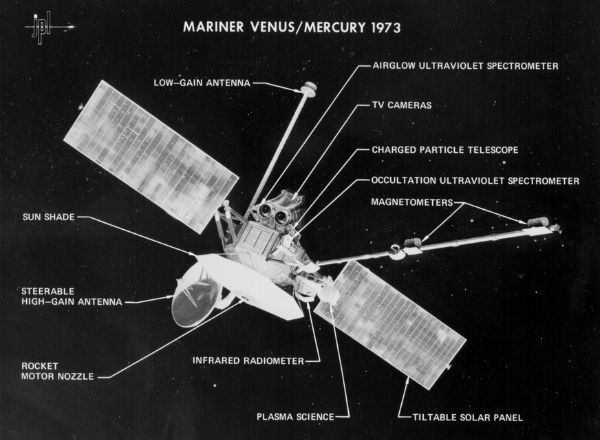
The Mariner 10 probe lifted off from Cape Canaveral on November 3, 1973 aboard an Atlas-Centaur booster, bound for the planet Mercury. Although it was equipped with an RCS system that used compressed nitrogen gas as propellant, it is unique for being not only the first spacecraft to visit Mercury, but also the first spacecraft to use a phenomenon known as radiation pressure to control its attitude.
Photons (the particles that make up light) have no ‘rest’ mass, but they do have a tiny amount of momentum. As a result, when they bounce off or are absorbed by a surface, they exert a miniscule force. Mariner 10 exploited the effect of the Sun’s radiation pressure on its Solar panels and high-gain antenna for attitude control. When it needed to rotate, it strategically realigned these surfaces so that the Sun’s light exerted an asymmetric pressure on the probe. The forces involved were tiny, but still significant.
Because the force exerted is so small and requires the realignment of large, reflective surfaces, radiation pressure is not a commonly used means of attitude control. Nevertheless, it is interesting to explore.
Guiding explorers to Mars
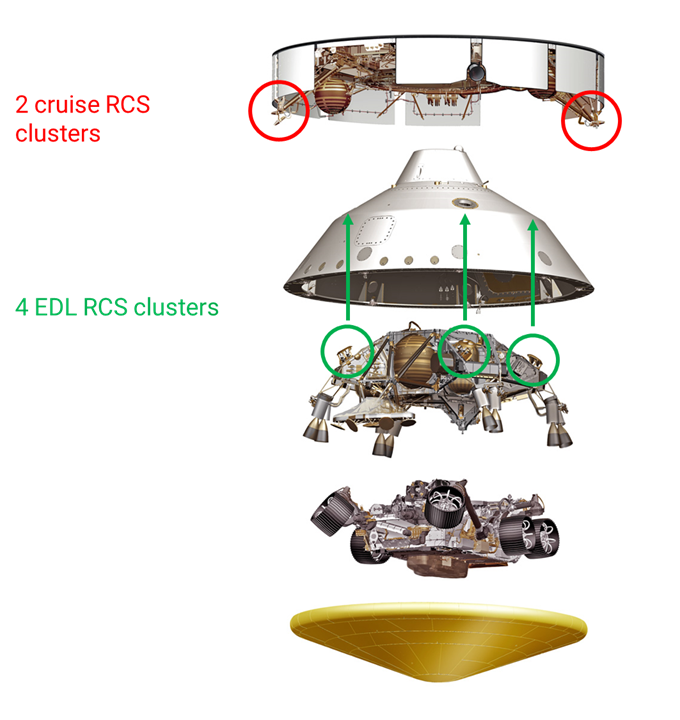
Spacecraft maneuvering and control is a deep and complex field4, and it is vital to the success of all space missions. Radiation pressure is just one of the countless innovative solutions engineers have devised for controlling spacecraft in space. This novel environment, with three dimensions and no friction, demands novel solutions. As we’ve seen, there is a wide range of attitude control methods that can be used, based on the mission and the spacecraft’s design. A good example comes from the Perseverance rover, which recently landed on Mars.
On the way to Mars, its cruise stage fine-tuned its trajectory with occasional Trajectory Correction Maneuvers (TCMs) throughout the trip. It used RCS thrusters for this. And as it plummeted through the atmosphere towards Mars, RCS thrusters on the skycrane controlled its attitude. For more information, read our Rocket Physics Special on Perseverance.
As humanity continues its exploration of Mars and beyond, the science of spacecraft control and dynamics will become more important than ever. The next time you learn about a space mission, take a moment to appreciate the physics and engineering it took simply to keep it pointed in the right direction.
Footnotes and further reading
1 Remember the Cant!
2 This provides a deeper dive into magnetorquer physics:
The torque exerted by the rod is equal to the cross product of the magnetorquer’s dipole strength and the vector of the local magnetic dipole. This means that when activated, a magnetorquer will exert a torque that tries to get the magnetic fields to point in the same direction. This force is strongest when the angle between the fields is 90 degrees (perpendicular) and is zero when the angle between them is 0 or 180 degrees (parallel.) This means that if any torque rod somehow becomes parallel to the local magnetic field, the spacecraft loses the ability to turn itself about that rod’s axis – it loses that degree of freedom. It would need to use its other torque rods to pull that rod out of alignment before it can regain control about that axis.
3 As always, there are technicalities and exceptions. You can change a spacecraft’s linear momentum by pushing off the planet’s magnetic field, but this is more suitable as a low-thrust propulsion system, especially because the directions you can push in are limited. Magnetorquers aren’t designed for this. What you would want to use is a device called an electrodynamic tether.
4 For a deeper dive into the weird world of rigid-body dynamics, learn about the Dzhanibekov effect from Veritasium:
Be a part of this!
The Mars Society of Canada offers a professional and credible platform for all space advocates to promote Canada’s participation in Mars science and exploration. By becoming a member of our federal not-for-profit, you provide direct support for our educational, public outreach and analog research efforts. We proudly represent the voice of thousands of Canadians who believe in the profound benefit of Mars exploration, and a multi-planetary future for humanity.